Graph Traversal: Dijkstra
6+ hours across 72 lessons — Data Structures, Algorithms, Cryptography, Binary, Software Design, and Essential Unix Skills.
In the last chapter we iterated over a simple graph using Bellman-Ford to find the shortest paths from a single vertex (our source) to all other vertices in the graph.
The complexity of Bellman-Ford is O(|V| E), which can approximate O(n^2) if every vertex has at least one outgoing edge. In other words: it's not terribly efficient.
Dijkstra's algorithm requires only one iteration, however and has a complexity of O(|V| log V), which is much more efficient.
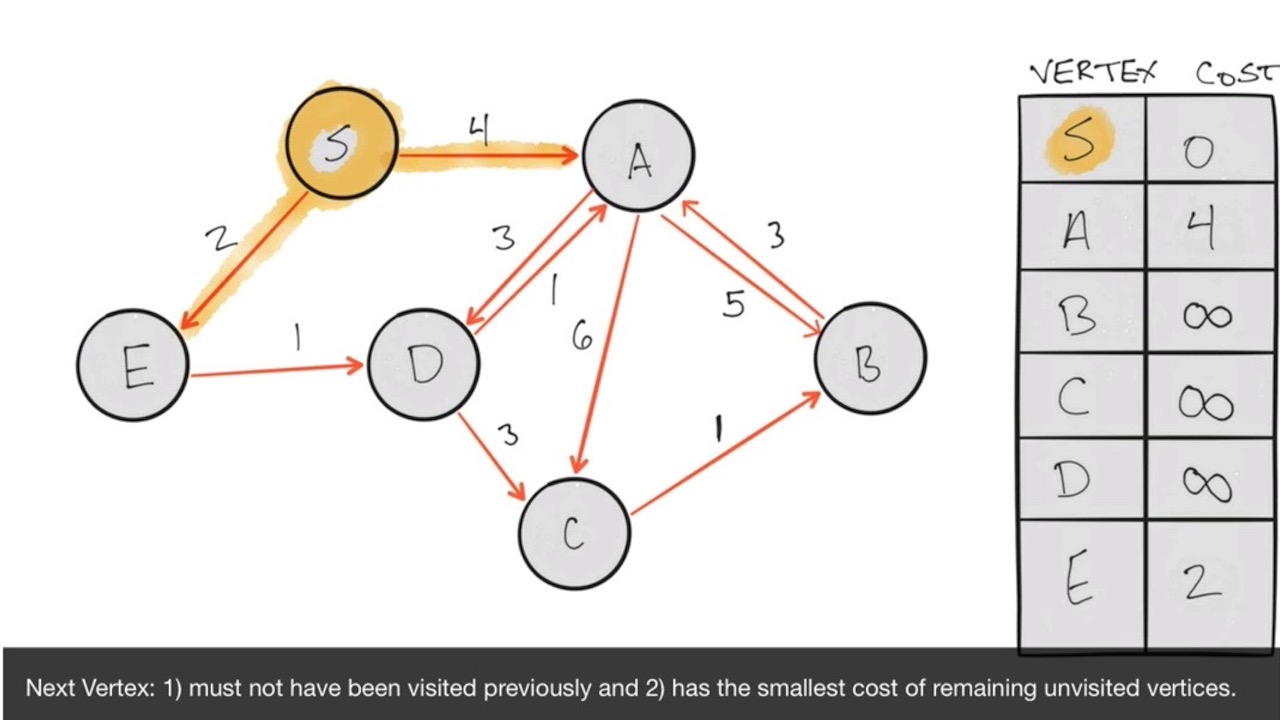
As with Bellman-Ford, we'll use a directed, weighted graph with 6 vertices. In addition, we'll setup a memo table with our source S set to 0 and the rest of the vertices set to infinity.
There is a difference here, however, and it's critical! Dijkstra doesn't work with negative edge weights! I have adjusted this graph so that we don't have any negative weights, as you can see. Specifically the edges between S and E as well as C to B. In addition I've added a few edges to show that the algorithm will scale easily regardless of the number of edges involved.
<span class="hljs-comment">//Dijkstra: Shortest path calculation</span>
<span class="hljs-comment">//on an edge-weighted, directed graph</span>
<span class="hljs-keyword">class</span> <span class="hljs-title class_">MemoTable</span>{
<span class="hljs-title function_">constructor</span>(<span class="hljs-params">vertices</span>){
<span class="hljs-variable language_">this</span>.<span class="hljs-property">S</span> = {<span class="hljs-attr">name</span>: <span class="hljs-string">"S"</span>, <span class="hljs-attr">cost</span>: <span class="hljs-number">0</span>, <span class="hljs-attr">visited</span>: <span class="hljs-literal">false</span>};
<span class="hljs-variable language_">this</span>.<span class="hljs-property">table</span> = [<span class="hljs-variable language_">this</span>.<span class="hljs-property">S</span>];
<span class="hljs-keyword">for</span>(<span class="hljs-keyword">var</span> vertex <span class="hljs-keyword">of</span> vertices){
<span class="hljs-variable language_">this</span>.<span class="hljs-property">table</span>.<span class="hljs-title function_">push</span>({<span class="hljs-attr">name</span>: vertex, <span class="hljs-attr">cost</span>: <span class="hljs-title class_">Number</span>.<span class="hljs-property">POSITIVE_INFINITY</span>, <span class="hljs-attr">visited</span>: <span class="hljs-literal">false</span>});
}
};
<span class="hljs-title function_">getCandidateVertices</span>(<span class="hljs-params"></span>){
<span class="hljs-keyword">return</span> <span class="hljs-variable language_">this</span>.<span class="hljs-property">table</span>.<span class="hljs-title function_">filter</span>(<span class="hljs-function"><span class="hljs-params">entry</span> =></span> {
<span class="hljs-keyword">return</span> entry.<span class="hljs-property">visited</span> === <span class="hljs-literal">false</span>;
});
};
<span class="hljs-title function_">nextVertex</span>(<span class="hljs-params"></span>){
<span class="hljs-keyword">const</span> candidates = <span class="hljs-variable language_">this</span>.<span class="hljs-title function_">getCandidateVertices</span>();
<span class="hljs-keyword">if</span>(candidates.<span class="hljs-property">length</span> > <span class="hljs-number">0</span>){
<span class="hljs-keyword">return</span> candidates.<span class="hljs-title function_">reduce</span>(<span class="hljs-function">(<span class="hljs-params">prev, curr</span>) =></span> {
<span class="hljs-keyword">return</span> prev.<span class="hljs-property">cost</span> < curr.<span class="hljs-property">cost</span> ? prev : curr;
});
}<span class="hljs-keyword">else</span>{
<span class="hljs-keyword">return</span> <span class="hljs-literal">null</span>;
}
};
<span class="hljs-title function_">setCurrentCost</span>(<span class="hljs-params">vertex, cost</span>){
<span class="hljs-variable language_">this</span>.<span class="hljs-title function_">getEntry</span>(vertex).<span class="hljs-property">cost</span> =cost;
};
<span class="hljs-title function_">setAsVisited</span>(<span class="hljs-params">vertex</span>){
<span class="hljs-variable language_">this</span>.<span class="hljs-title function_">getEntry</span>(vertex).<span class="hljs-property">visited</span> = <span class="hljs-literal">true</span>;
};
<span class="hljs-title function_">getEntry</span>(<span class="hljs-params">vertex</span>){
<span class="hljs-keyword">return</span> <span class="hljs-variable language_">this</span>.<span class="hljs-property">table</span>.<span class="hljs-title function_">find</span>(<span class="hljs-function"><span class="hljs-params">entry</span> =></span> entry.<span class="hljs-property">name</span> == vertex);
};
<span class="hljs-title function_">getCost</span>(<span class="hljs-params">vertex</span>){
<span class="hljs-keyword">return</span> <span class="hljs-variable language_">this</span>.<span class="hljs-title function_">getEntry</span>(vertex).<span class="hljs-property">cost</span>;
};
<span class="hljs-title function_">toString</span>(<span class="hljs-params"></span>){
<span class="hljs-variable language_">console</span>.<span class="hljs-title function_">log</span>(<span class="hljs-variable language_">this</span>.<span class="hljs-property">table</span>);
}
};
<span class="hljs-keyword">const</span> vertices = [<span class="hljs-string">"A"</span>, <span class="hljs-string">"B"</span>,<span class="hljs-string">"C"</span>, <span class="hljs-string">"D"</span>, <span class="hljs-string">"E"</span>];
<span class="hljs-keyword">const</span> graph = [
{<span class="hljs-keyword">from</span> : <span class="hljs-string">"S"</span>, to :<span class="hljs-string">"A"</span>, <span class="hljs-attr">cost</span>: <span class="hljs-number">4</span>},
{<span class="hljs-keyword">from</span> : <span class="hljs-string">"S"</span>, to :<span class="hljs-string">"E"</span>, <span class="hljs-attr">cost</span>: <span class="hljs-number">2</span>},
{<span class="hljs-keyword">from</span> : <span class="hljs-string">"A"</span>, to :<span class="hljs-string">"D"</span>, <span class="hljs-attr">cost</span>: <span class="hljs-number">3</span>},
{<span class="hljs-keyword">from</span> : <span class="hljs-string">"A"</span>, to :<span class="hljs-string">"C"</span>, <span class="hljs-attr">cost</span>: <span class="hljs-number">6</span>},
{<span class="hljs-keyword">from</span> : <span class="hljs-string">"A"</span>, to :<span class="hljs-string">"B"</span>, <span class="hljs-attr">cost</span>: <span class="hljs-number">5</span>},
{<span class="hljs-keyword">from</span> : <span class="hljs-string">"B"</span>, to :<span class="hljs-string">"A"</span>, <span class="hljs-attr">cost</span>: <span class="hljs-number">3</span>},
{<span class="hljs-keyword">from</span> : <span class="hljs-string">"C"</span>, to :<span class="hljs-string">"B"</span>, <span class="hljs-attr">cost</span>: <span class="hljs-number">1</span>},
{<span class="hljs-keyword">from</span> : <span class="hljs-string">"D"</span>, to :<span class="hljs-string">"C"</span>, <span class="hljs-attr">cost</span>: <span class="hljs-number">3</span>},
{<span class="hljs-keyword">from</span> : <span class="hljs-string">"D"</span>, to :<span class="hljs-string">"A"</span>, <span class="hljs-attr">cost</span>: <span class="hljs-number">1</span>},
{<span class="hljs-keyword">from</span> : <span class="hljs-string">"E"</span>, <span class="hljs-attr">to</span>: <span class="hljs-string">"D"</span>, <span class="hljs-attr">cost</span>: <span class="hljs-number">1</span>}
]
<span class="hljs-keyword">const</span> memo = <span class="hljs-keyword">new</span> <span class="hljs-title class_">MemoTable</span>(vertices);
<span class="hljs-keyword">const</span> <span class="hljs-title function_">evaluate</span> = vertex => {
<span class="hljs-keyword">const</span> edges = graph.<span class="hljs-title function_">filter</span>(<span class="hljs-function"><span class="hljs-params">path</span> =></span> {
<span class="hljs-keyword">return</span> path.<span class="hljs-property">from</span> === vertex.<span class="hljs-property">name</span>;
});
<span class="hljs-keyword">for</span>(edge <span class="hljs-keyword">of</span> edges){
<span class="hljs-keyword">const</span> currentVertexCost = memo.<span class="hljs-title function_">getCost</span>(edge.<span class="hljs-property">from</span>);
<span class="hljs-keyword">const</span> toVertexCost = memo.<span class="hljs-title function_">getCost</span>(edge.<span class="hljs-property">to</span>);
<span class="hljs-keyword">const</span> tentativeCost = currentVertexCost + edge.<span class="hljs-property">cost</span>;
<span class="hljs-keyword">if</span>(tentativeCost < toVertexCost){
memo.<span class="hljs-title function_">setCurrentCost</span>(edge.<span class="hljs-property">to</span>, tentativeCost);
}
};
memo.<span class="hljs-title function_">setAsVisited</span>(vertex.<span class="hljs-property">name</span>);
<span class="hljs-keyword">const</span> next = memo.<span class="hljs-title function_">nextVertex</span>();
<span class="hljs-keyword">if</span>(next) <span class="hljs-title function_">evaluate</span>(next);
}
<span class="hljs-comment">//kick it off from the source vertex</span>
<span class="hljs-title function_">evaluate</span>(memo.<span class="hljs-property">S</span>);
memo.<span class="hljs-title function_">toString</span>();
6+ hours across 72 lessons — Data Structures, Algorithms, Cryptography, Binary, Software Design, and Essential Unix Skills.